Network from OSM download#
This tutorial shows how to download and configure a road network from OpenStreetMap (OSM) and process it using the RA2CE library.
Step 1. Import the Required Packages#
[1]:
from pathlib import Path
import geopandas as gpd
from shapely.geometry.polygon import Polygon
from ra2ce.network.network_config_data.enums.road_type_enum import RoadTypeEnum
from ra2ce.network.network_config_data.enums.network_type_enum import NetworkTypeEnum
from ra2ce.network.network_config_data.network_config_data import NetworkSection, NetworkConfigData
from ra2ce.network.network_config_data.enums.source_enum import SourceEnum
from ra2ce.ra2ce_handler import Ra2ceHandler
c:\Users\hauth\miniforge3\envs\ra2ce_env\Lib\site-packages\tqdm\auto.py:21: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from .autonotebook import tqdm as notebook_tqdm
Step 2. Define a Region of Interest#
Create a bounding box for the area of interest and save it as a geojson file.
[ ]:
root_dir = Path("data", "network_from_OSM")
network_path = root_dir / "network"
polygon = Polygon([
[4.925796685034555, 52.15567004009617],
[4.925796685034555, 51.969875228118696],
[5.263478289905265, 51.969875228118696],
[5.263478289905265, 52.15567004009617],
[4.925796685034555, 52.15567004009617]
])
# Convert polygon into geojson file
gdf_polygon = gpd.GeoDataFrame(index=[0], crs="EPSG:4326", geometry=[polygon])
gdf_polygon_path = network_path.joinpath("polygon.geojson")
gdf_polygon.to_file(gdf_polygon_path, driver="GeoJSON")
Step 3. Network Configuration#
Define the network configuration using NetworkConfigData and NetworkSection classes., specifying OSM as the source and selecting road types.
[ ]:
network_section = NetworkSection(
source=SourceEnum.OSM_DOWNLOAD,
network_type=NetworkTypeEnum.DRIVE,
road_types=[RoadTypeEnum.MOTORWAY, RoadTypeEnum.PRIMARY],
polygon=gdf_polygon_path,
save_gpkg=True,
)
network_config_data = NetworkConfigData(
root_path=root_dir,
static_path=root_dir / "static",
network=network_section,
)
Step 4. Initialize and Configure RA2CE#
Generate the network and store results in static/output_graph.
[ ]:
handler = Ra2ceHandler.from_config(network=network_config_data, analysis=None)
handler.configure()
Step 5. Load and Inspect the Output#
[ ]:
path_output_graph = root_dir.joinpath("static", "output_graph")
base_graph_edges = path_output_graph.joinpath("base_graph_edges.gpkg")
edges_gdf = gpd.read_file(base_graph_edges, driver="GPKG")
base_graph_nodes = path_output_graph.joinpath("base_graph_nodes.gpkg")
nodes_gdf = gpd.read_file(base_graph_nodes, driver="GPKG")
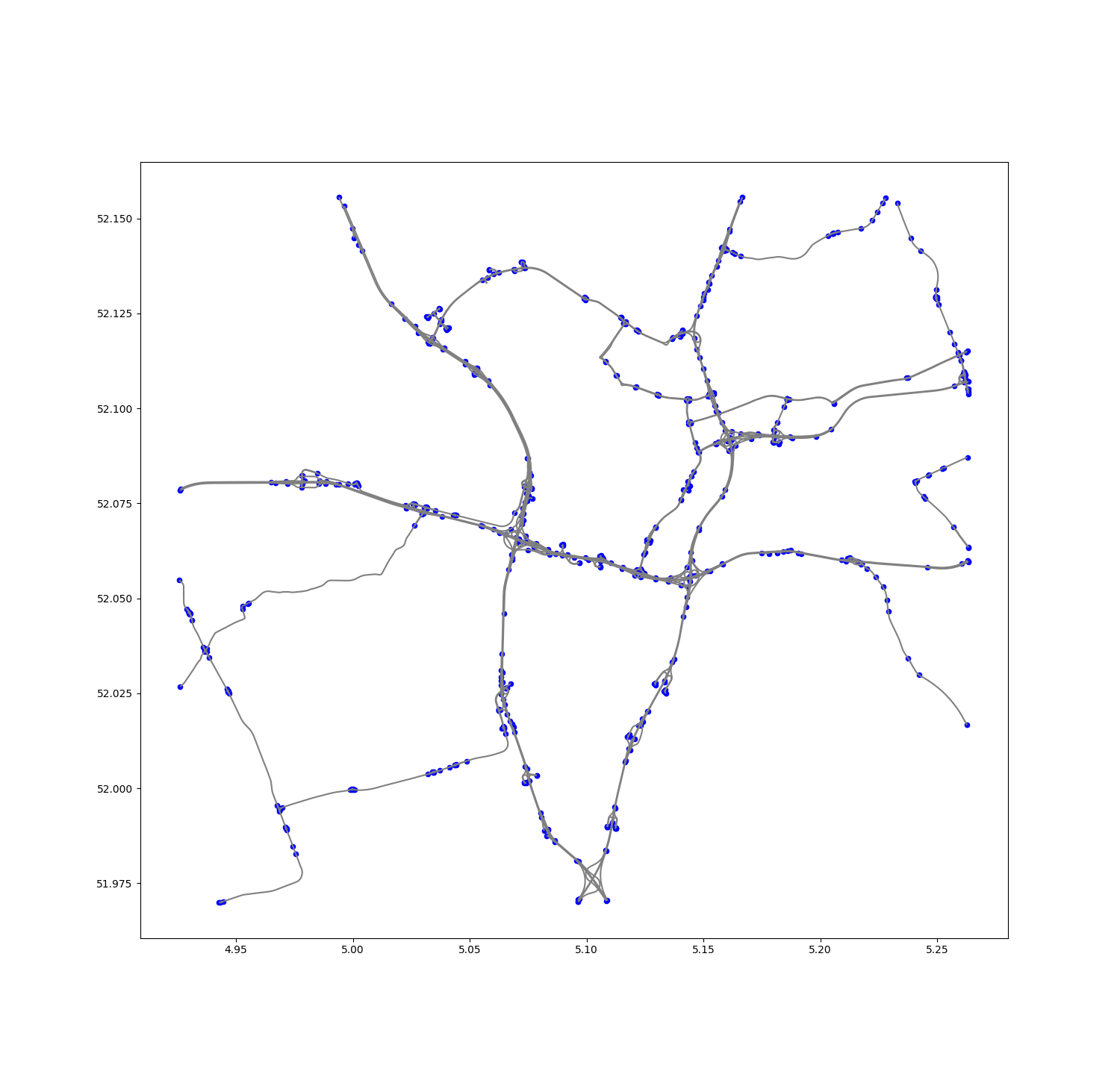
Step 6. Plot Nodes and Edges#
[ ]:
import matplotlib.pyplot as plt
fig, ax = plt.subplots(figsize=(15, 15))
# Plot edges first
baseplot = edges_gdf.plot(ax=ax, color="grey")
# Overlay nodes
nodes_gdf.plot(ax=baseplot, color="blue", markersize=20)
plt.show()